Project executive summary
We propose to investigate the swarm intelligence of independent individual artificial active particles (particles that are capable of propelling themselves with their own motor force). Such swarms of particles can explore unknown landscapes (for example a swarm of rescue robots sent into an unknown landscape affected by an earthquake), escape from or pass through obstacles (nano sized robots delivering nutrients or drugs passing through biological barriers) or be stopped by well designed obstacle configurations (limiting the spread of bacteria). Our project will investigate the topic with an interdisciplinary approach, from a Computer Science perspective, running computer simulations of the phenomena, from a Physics and Robotics perspective of building small (cm sized) robot swarms (of more than 50 robots) with microcontrollers where the individual robots that can alter their behavior based on local interaction measurements, and from a chemical perspective of building a system of micron sized polystyrene beads acting as Quincke rotors in a switched electric field mimicking the run and tumble motion of bacteria.
Project Description
Swarms of Independent Active Matter particles forming cooperative ensembles with emergent behavior
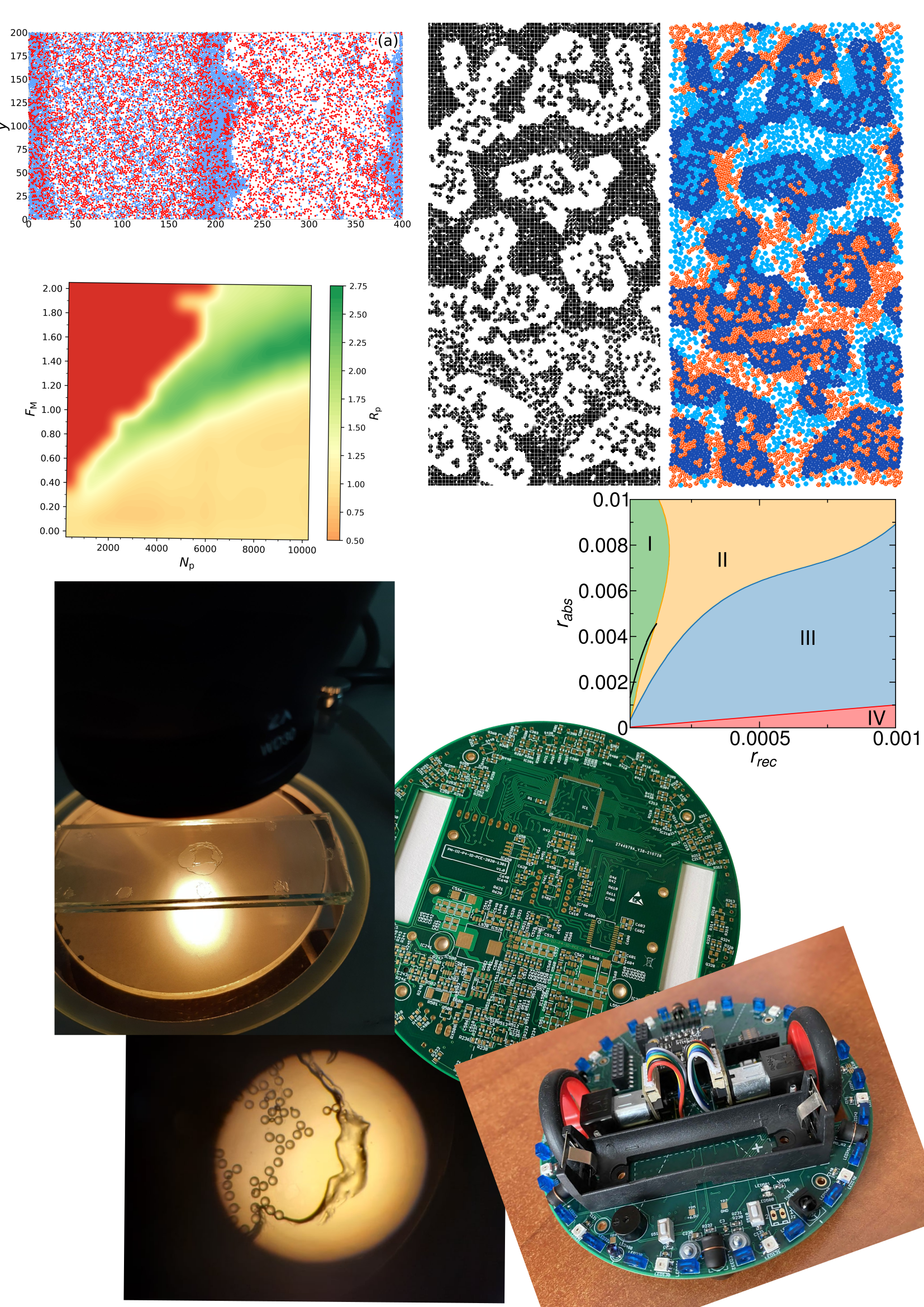
In this research grant, we investigate multiple active matter particles passing through a quenched disordered landscape (a series of obstacles). These particles have a tendency to form a large cluster and move together. This partcile swarm exhibits interesting emergent behavior that is more complex than the simple rules that the individual particles obey. Using a Brownian Dynamics simulation code developed by our research group, we studied the interaction of such a particle swarms with a heterogeneous pinning substrate and observed a novel phenomena of shepherding. We also studied a system where the substrate is modified by the particles above it that "consume it", finding different interesting regimes or collective motion as a function of the consumption and recovery rates in out system as well as the density and the ratio of active/passive particles in the system. We also studied the more complex behavior of an SIR epidemiologic model applied to our active matter system where the individual changes of behavior affects the way the entire swarm responds to the spreading of an infection. We extended this study to a case where recovery is only possible when caretakers and medicine is available and demonstrated a model that is capable of going from SI to SIR behavior. We have also studied a point contact poisoning model where the infected particles stop their active motion once they become infected. This is relevant not only in biology, but also in the study of catalyst poisoning.
To complement the simulation studies, we designed and built small robots (about 12 centimeters in diameter) capable of running an algorithm independently on their processors. They have wireless and bluetooth capability, they can sense the color and intensity of the surface they are moving on in multiple points thus being capable of following a gradient and have a series of IR LEDs and sensors along their perimeter that they can use to detect the proximity of other robots, as well as detecting the ID of the neighboring robots. They have two independently controlled motors, driving their wheels that allows precise turns and movement. The robot knows its heading from a magnetometer and can signal different states to a camera above it via several smart RGB LEDs and it can communicate with other robots and the central server with an RF chip.
We performed an experiment where small (40 micron) PMMA particles are undergoing Quincke rotation and self-propulsion in an electric field. The sample is created between two transparent ITO covered glass plates held at a fixed distance of 180 microns by a monolayer of precise glass beads embedded in a vacuum grease wall that holds the hexadecane solution and the PMMA particles inside the cell. This makes it possible to apply an electric field of 2 MV/m by applying a voltage of 400-600 V to the ITO layer on the plates. The rotation can be tracked via video microscopy and data about the position of the particles or the velocity field can be extracted.
Realizations
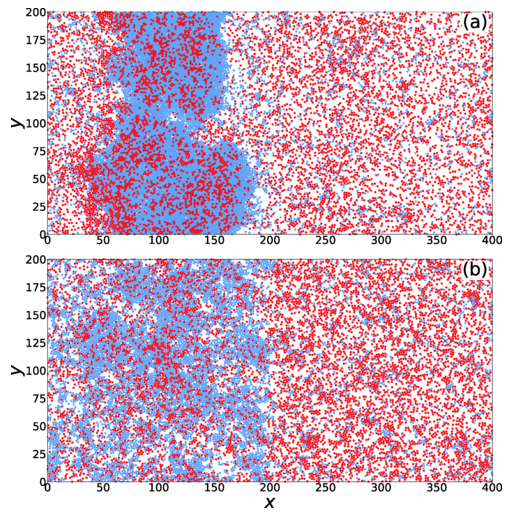
We studied the behavior of a mix of active and passive particles
by simulating active particles with elastic disc interactions on a landscape that consisted of a half space filled with
obstacles and another half space free of obstacles. We found an emergent behavior of the system where the active particles
prefer to stay in the half-plane with the obstacles and gradually shepherd the passive particles out from among them into
the open obstacle-free region. We studied this new phenomenon we call shepherding as a function of particle density and
active motor force. We published our results in the article:
Phys. Rev. E 104, 044613 (2021).
We introduced an SIR model into our active matter model to
understand failures of the mixing assumption,important for designing effective disease mitigation approaches. Working
in the motility-induced phase separation regime both with and without quenched disorder, we found two epidemic regimes.
For low transmissibility, quenched disorder lowers the frequency of epidemics and increases their average duration.
For high transmissibility, the epidemic spreads as a front and the epidemic curves are less sensitive to quenched disorder;
however, within this regime it is possible for quenched disorder to enhance the contagion by creating regions of
higher particle densities. We discussed how this system could be realized experimentally. We published our
results in the article: Scientific Reports 12, 11229 (2022).
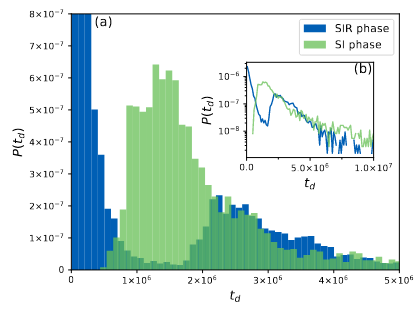
The Susceptible-Infected (SI) and Susceptible-Infected-Recovered (SIR)
models provide two distinct representations of epidemic evolution, distinguished by the lack of spontaneous recovery in the SI
model. Here we introduce a new active matter epidemic model that can transition between these two asymptotic behaviors, as it
only allows recovery in the presence of caretakers administering treatment, so we can have a transition both as a function of
the caretaker fraction of the population and the effectiveness of the treatment. Ourt results are applicable for diseases such as HIV.
We published our results in the article:
Phys. Rev. E 107, 024604 (2023).
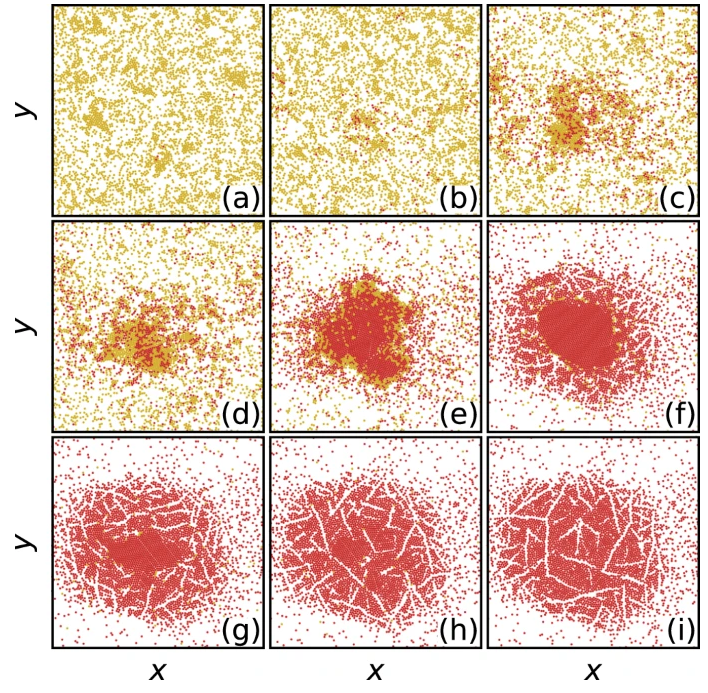
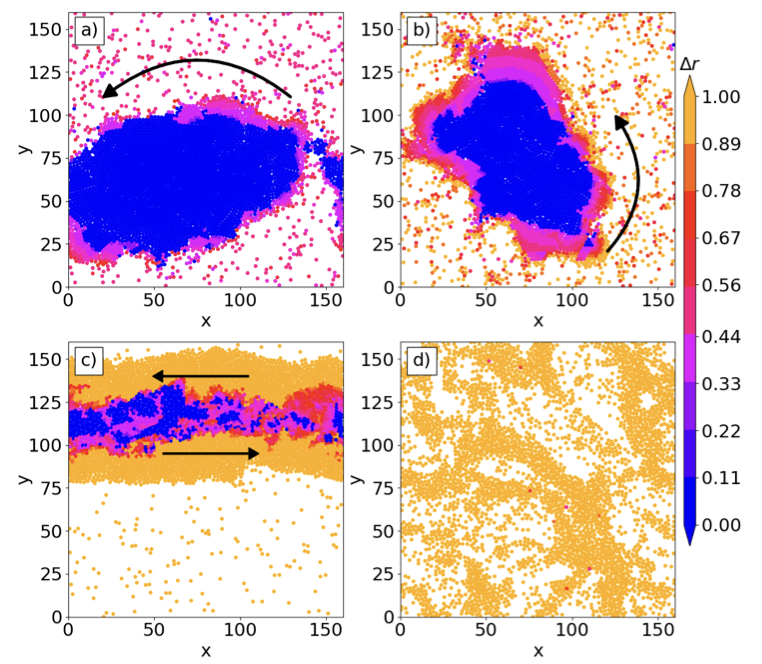
We studied a system of active particles that are below the density
where a spontaneous large cluster would form (the so called MIPS or Motility Induced Phase Separation). We added am epidemiological
layer with a one-way transition from living or moving to dead or nonmotile due to lack of fuel, infection, or poisoning.
This precipitates a MIPS phase, a wetting phase and a fragmented state formation, in this order. Our results are published in the article:
Communications Physics 6, 294 (2023).
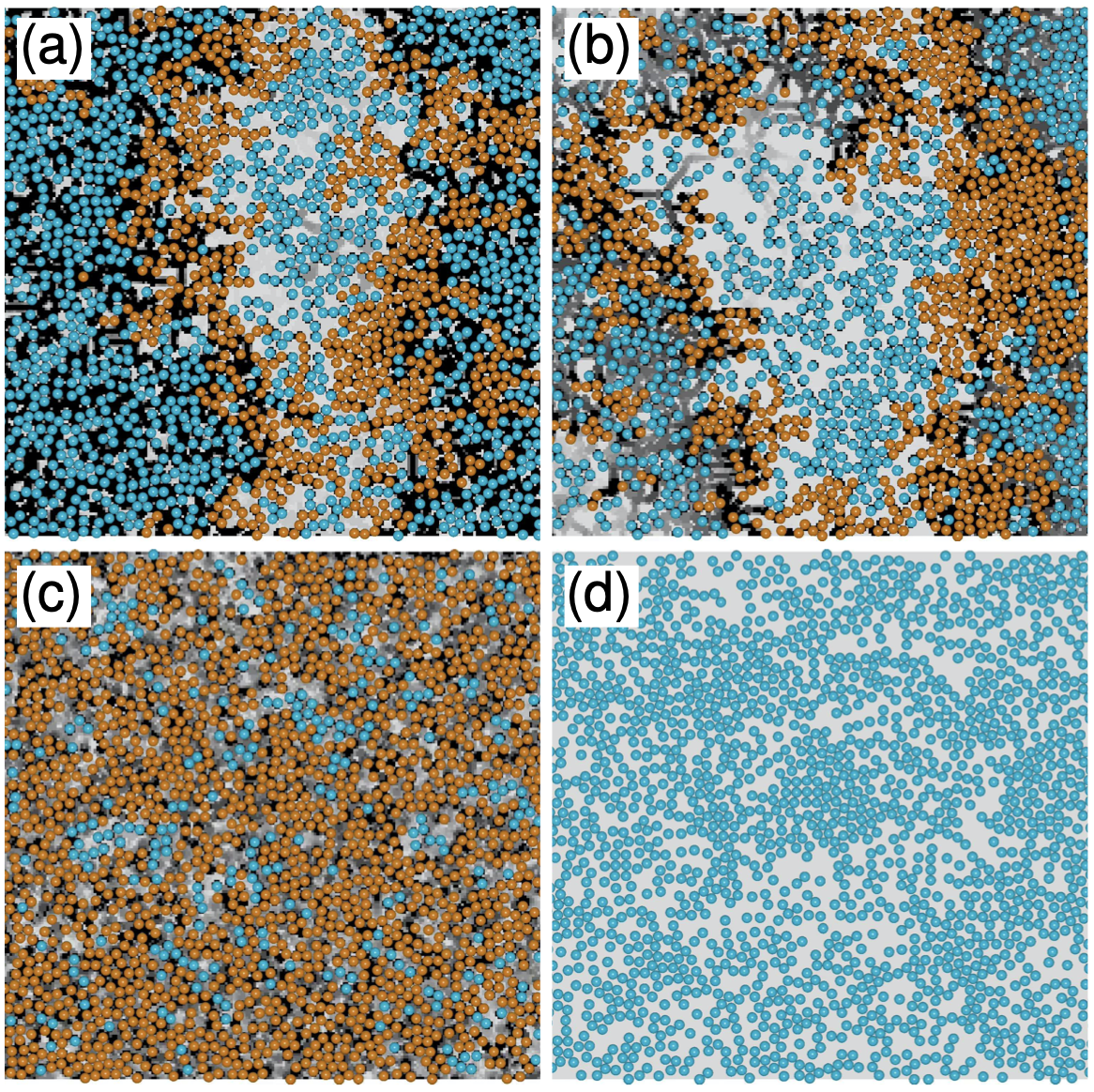
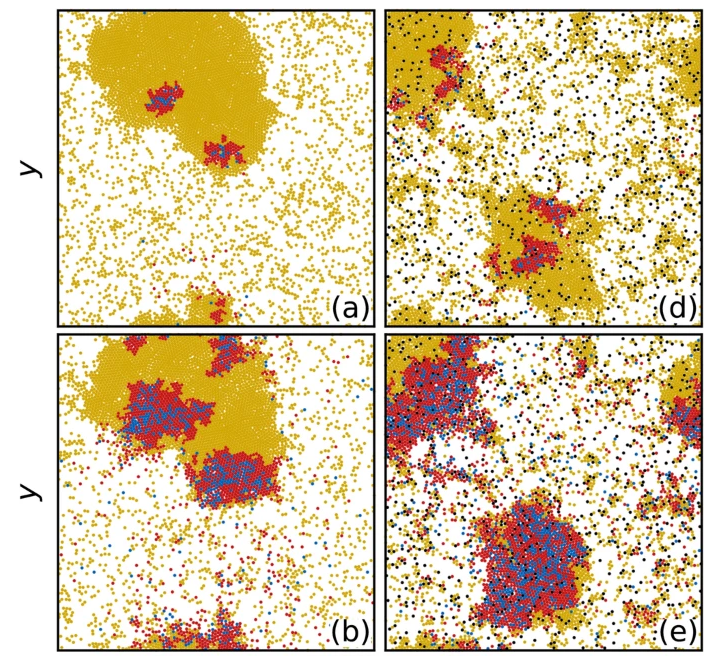
We studied a system of an active substrate that is modified by
the particles that are moving above it. The particles consume the substrate grid points they cover at a given rate and move
towards the direction of the substrate gradient, and the substrate recovers at a fixed rate. The system exhibits interesting
collective behaviors depending on the consumption and recovery rates as well as the particle density. We published our
results in the article: Phys. Rev. Research 4, 013061 (2022).
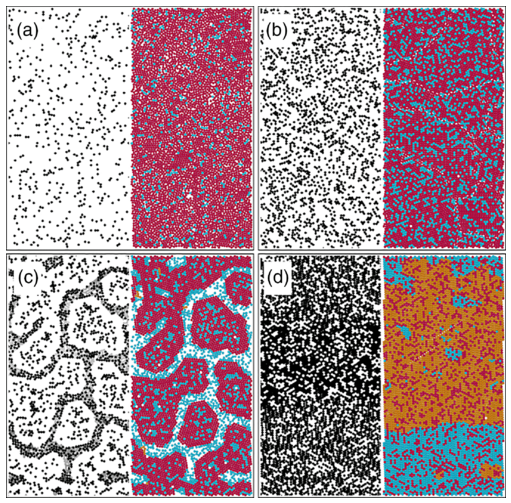
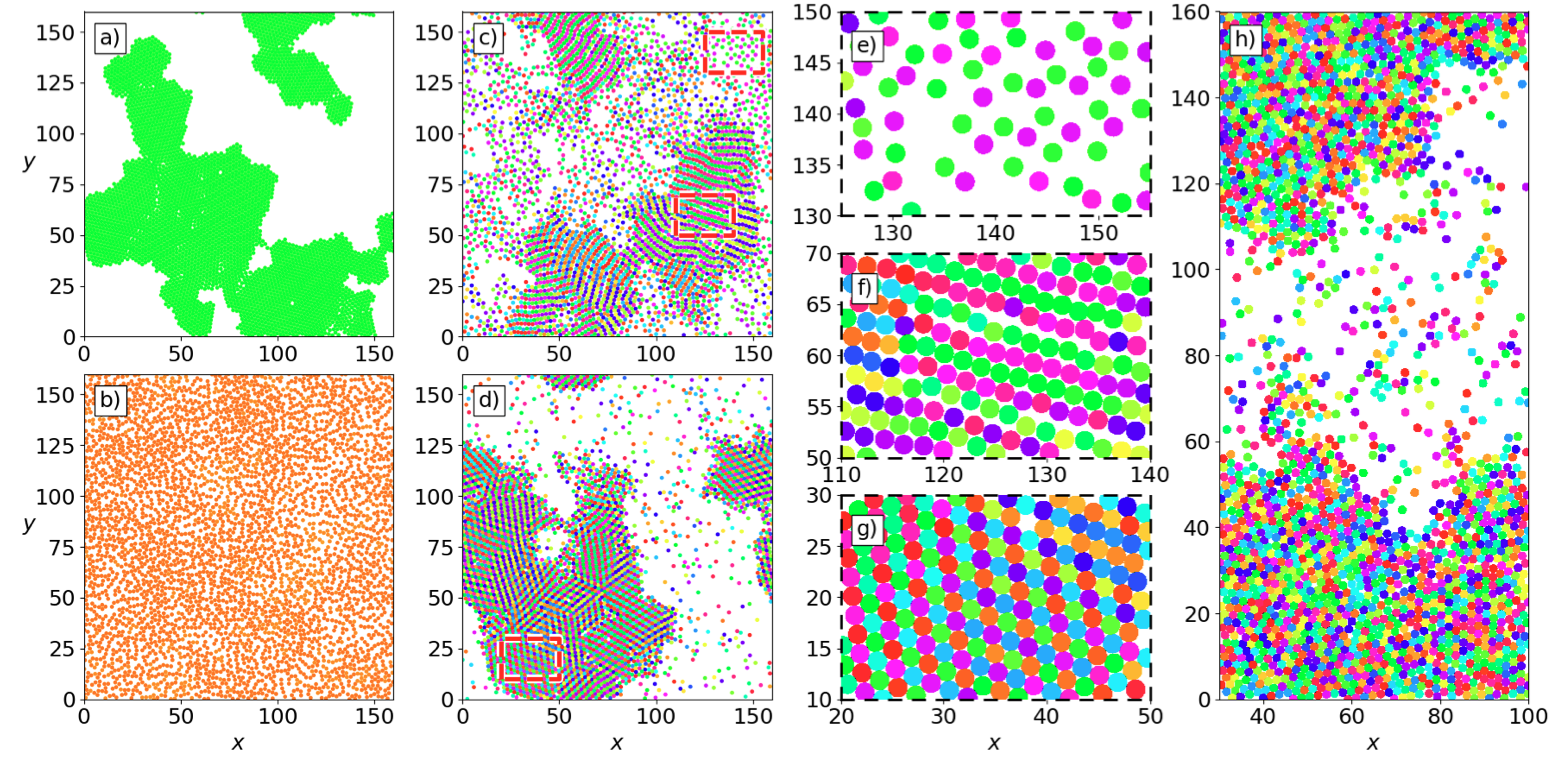
We studied in detail the active substrate system that
we introduced in the previous paper and showed a rich variety of pattern-forming phases along with directed motion or
flocking as a function of the relative rates of resource absorption and consumption as well as the active to passive
particle ratio. These include partial phase separation into rivers of active particles flowing through passive clusters,
strongly phase separated states where the active particles induce crystallization of the passive particles, mixed jammed
states, and fluctuating mixed fluid phases. We published our results in the article:
Phys. Rev. E 106, 064602 (2022).
We contributed to an outlook paper, where we discussed
the possibility and the advantages of such individual and collectively interacting active matter particles coupled to
periodic substrates, where new types of commensuration effects, directional locking, and active phases can occur.
Further directions for exploration that we indicated include locking effects, the realization of active solitons
or active defects in incommensurate phases, active Mott phases, active artificial spin ice, active doping transitions,
active floating phases, active surface physics, active matter time crystals, and active tribology. We published our
results in the article: Europhysics Letters 139, 27001 (2022).
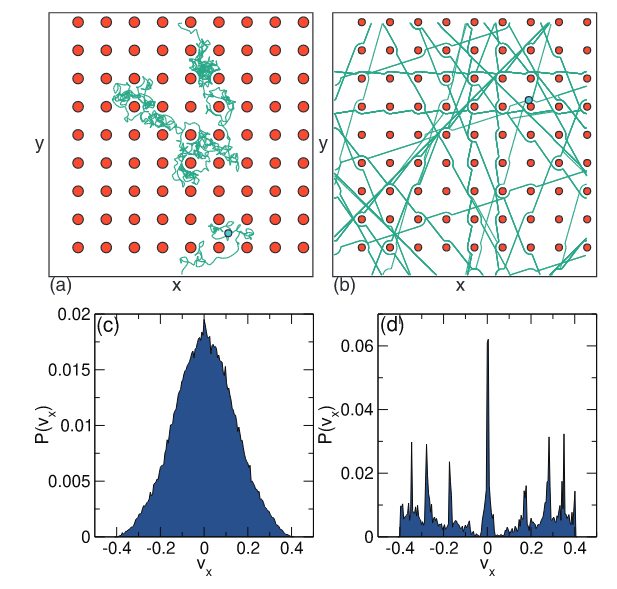
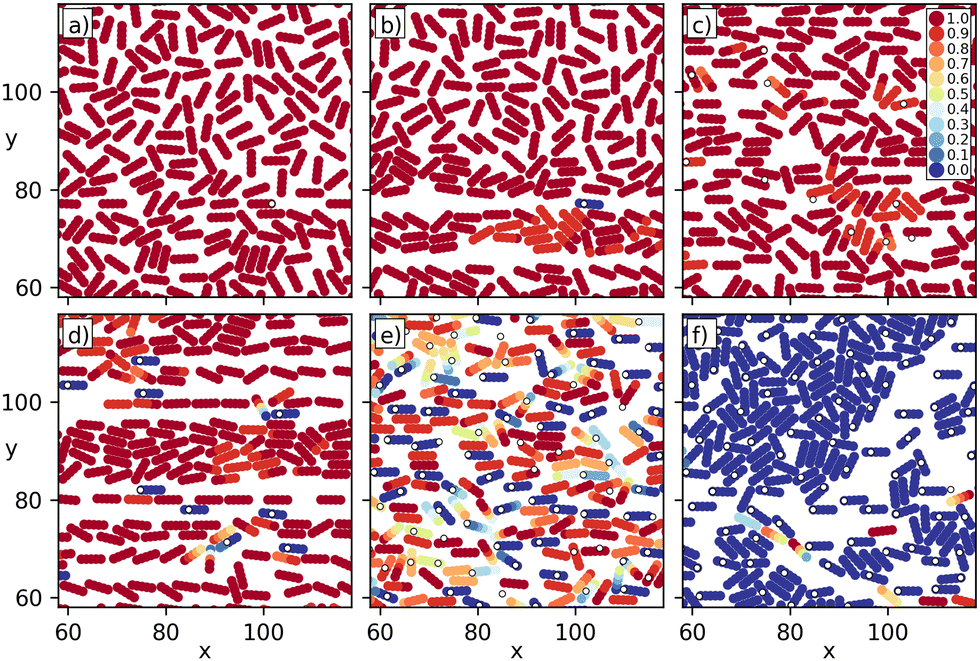
We studied a system of elongated particles
driven over randomly placed pinning sites. For varied pinning site density, external drive magnitude, and particle elongation,
we found a wide variety of dynamic phases, including random structures, stripe phases with nematic order,
and clogged states. The optimal nematic ordering occurs when a enough particles can be pinned, generating a
local shear and leading to what we call a combing effect. We published our results in the article:
Soft Matter 19, 7937 (2023).
We studied a system of active matter swarmalators. These
active matter particles have an additional interaction that was inspired by swarm robotics, an interaction that is dependent
on their internal parameter and a coupling constant. They also act on modifying this internal parameter of their neighbors
via a separate interaction. We found a very rich phase diagram with multiple interesting
regimes in this system. We submitted our findings to Phys. Rev. E, with the preprint available here:
manuscript submitted
We examined a system of run-and-tumble disks in two-dimensions
where the particles also have a Magnus component to their dynamics. For increased activity, we find that the system
forms a motility-induced phase-separated (MIPS) state with chiral edge flow around the clusters. We found that smaller amplitude
Magnus forces stabilize the clusters, while large Magnus forces break it up into a gel-like state. In the presence of quenched
disorder and a uniform drive, and find that the bulk flow exhibits a drive-dependent Hall angle explained with a side-step inside
the pinning sites. We submitted our fidings to Phys. Rev. E, with the preprint
available here: manuscript submitted
We constructed a robot prototype. We designed a
four-layer printed circuit board that holds the main microcontroller and all the peripherical chips and that
allows the robot to communicate via wireless and bluetooth, signal the camera with RGB LEDs, drive two wheels,
light up the array of IR LEDs on its perimeter for both distance measurement as well as inter-robot communication
and also read the IR signal in multiple places around its perimeter. The robot also has sensors mounted underneath
that can observe the pattern and gradients it is moving over. The designed allows for the possibility of being
extended with a shield for future modularity. We wrote the SDK and tested most of the robot functions, the robot
can sense its surroundings and differentiate between a passive obstacle and another robot and in the case they
are close to each other can read the other robot's code via the IR signals. We also designed and built the TV
surface on which the robots move, including equipping the laboratory with blinds to set the desired amount of
ambient light for our experiments, and set up the camera and the robot tracking algorithm. We made the first batches
of robots and currently have about 20 robots that are functional and can perform experiments with more being assembled
gradually, up to 50+ robots for the creation of swarms. We presented our robot at Lakeside Labs in Klagenfurt and started
a collaboration on swarm robotics with the group of prof. Christian Bettstetter.
We repeated the experiment with the Quincke
rollers that was performed in Northwestern University. We invited the researcher who performed the experiments,
dr. Gasper Kokot from the Iozef Stefan Institute in Ljubljana, and we learned the steps involved in preparing
the sample with the correct separation between the plates, application of the voltage and observation of the
rolling effect. We are working on modifying our setup with a better microscope and a better camera for
future experiments.
Publications resulting from this grant
P. Forgács, A. Libál, C. Reichhardt and C. J. O. Reichhardt
Active matter
shepherding and clustering in inhomogeneous environments
Phys. Rev. E 104, 044613 (2021)
L Varga, A Libál, C. J. O. Reichhardt, C Reichhardt
Active regimes for particles on
resource landscapes
Phys. Rev. Research 4, 013061 (2022)
C. Reichhardt, A Libál, C. J. O. Reichhardt
Future directions for active matter on
ordered substrates
Europhysics Letters 139, 27001 (2022)
P. Forgács, A. Libál, CJO Reichhardt, C Reichhardt
Using active matter to introduce
spatial heterogeneity to the susceptible infected recovered model of epidemic spreading
Scientific Reports 12, 11229 (2022)
L. Varga, A. Libál, C. Reichhardt and C. J. O. Reichhardt
Using active matter to introduce
spatial heterogeneity to the susceptible infected recovered model of epidemic spreading
Phys. Rev. E 106, 064602 (2022)
A. Libál, P. Forgács, Á. Néda, C. Reichhardt, N. Hengartner and C.J.O Reichhardt : Transition
from Susceptible-Infected to Susceptible-Infected-Recovered Dynamics in a Susceptible-Cleric-Zombie-Recovered
Active Matter Model
Phys. Rev. E 107, 024604 (2023)
Péter Forgács, András Libál, Charles Reichhardt, Nicolas Hengartner, Cynthia J.O. Reichhardt :
Transient pattern formation in an active matter contact poisoning model
Communications Physics 6, 294 (2023)
A. Libál, S. Stepanov, C Reichhardt and C.J.O Reichhardt : Dynamic phases
and combing effects for elongated particles moving over quenched disorder
Soft Matter 19, 7937 (2023)
B. Adorjáni, A. Libál, C. Reichhardt, and C. J. O. Reichhardt : Phase Separation, Edge Currents, and Hall Effect for Active Matter with Magnus Dynamics
manuscript submitted, in evaluation
B. Adorjáni, A. Libál, C. Reichhardt, and C. J. O. Reichhardt : Motility Induced Phase Separation and Frustration in Active Matter Swarmalators
manuscript submitted, in evaluation
Development of Capabilities
Capability : Simulations
We have adapted our simulations to study the interplay of active matter with inhomogeneous pining landscapes, finding new interesting collective behaviors emerging. We investigated a novel system of an active substrate that is modified by the particles passing over it. We also incorporated an SIR model over our active particles to study the dynamics of a disease spreading over our active system, showing the link between the individual protocol and the emergent swarm behavior and showing the importance of spatial distribution in an SIR model. We showed a more complex epidemics model capable of switching between SI and SIR behavior. We investigated a contact poisoning model for the active system. We created a code for simulating elongated particles. We studied what happens when a Magnus force is added to active particles. Finally, we created an active matter swarmalator model, incorporating swarm robotics interactions into our particle-based model and discovering a rich phase diagram. We kept and expanded our collaboration with researchers from the Los Alamos National Laboratory, USA.
Capability : Active Robots
We designed a four-layer printed circuit board for the smart active robots and built the proptotypes testing their functionality. We have tested all the subsystems on the robot from the wireless to the bluetooth to the IR sensing capabilities as well as the sensors incorporated and the processors that run the code of a single actor insode the swarm. These robots are very versatile encompassing behavior from simple active matter particles to complex agents. We wrote the SDK for the robots for most of their buit-in sensors and communication devices, we tested and deployed the method by which the robots can us their IR LEDs and IR sensors to detect obstacles around them, determine if they are passive obstacles or other robots and determine the ID of the nearby robot if they are close by. We assembled the lab with proper light control (blinds) and the table with the TV on which the robots move as well as installed the camera and implemented a robot tracking algorithm. We showcased our robots at Lakeside Labs in Klagenfurt, Austria and created a new connection for future scientific collaborations.
Objective : Quincke rollers
We acquired all the materials necessary for the assembly of the Quincke roller experiment, the PMMA beads, a high voltage source, microscope glass plates coated with ITO for the capacitor, hexadecane and AOT salt for the calibration of the liquid and uniform glass beads of 180-220 microns to act as spacers between the plates. We Dr. Gasper Kokot, an expert in Quincke rollers from Slovenia, and we learned from him the cell preparation including setting the proper distance between the ITO covered plates with precision glass beads and the proper way of setting up the electrodes. We successfully replicated the previous experimental results. We are working on upgrading our setup with a new microscope and camera to be able to track particles in a larger area, using a larger field of view and smaller magnification, as well as being able to access higher rates of frames per second that are needed with this setup. We developed a research collaboration with an experimental research group from the University of Barcelona, Spain, who are capable and willing to supply us with photolitographed obstacles that we will need for our experiments.
Research Team

András Libál
Group leaderAndrás coordinates the group effort, the weekly group meetings with team members and our collaborators abroad. His expertise is writing of the simulation code, evaluation of the results, definition of the measurements and analysis of the data resulting from the simulations.

Réka Barabás
Senior researcherRéka coordinates the effort towards creating the Quincke roller setup and experiment, choosing the equipment and materials needed. Her expertise is in the chemical aspects,the correct handling of the materials and in the sythesis of differently shaped and functionalized rollers.

Arthur Tunyagi
Senior researcherArthur designed and tested the intelligent robots, chose and ordered the components and built the prototypes. His expertise is in the engineering aspects of these components as well as the development of the libraries necessary for the coding and deploying the robots in the experiments.

Levente Varga
Senior researcherLevente rewrote and adapted the code to accomodate a pinning surface that is influenced by the particles moving over it as well as optimized the code for running on CPUs. He is an expert in coding and optimization as well as in the visualization of the data. He also has an engineering background and will participate in coding the robot systems as well as image processing and extracting the data from the cameras observing the robotic and the Quincke setup.

Noémi-Izabella Farkas
PhD student (Chemistry)Noémi is responsible for assembling the cells for the Quincke experiments, setting the correct distance between the ITO covered glasses with spacers, creating a seal and filling the system with hexadecane and the PMMA Quincke rollers and gathering the video data from the cameras on the position of the particles during the experiment. Her expertise is in the chemistry of the components used in the experiment and handling experimental setups.

Péter Forgács
MSc student (Physics)Péter adapted the code to run the simulations for the active matter on the half-occupied pinning landscape, generated the results and made the figures and the corrections necessary for the publication. He also rewrote and adapted the active matter code to handle the overlaying SIR model. His expertise is in coding, adding the necessary statistical tools and analyzing the results from the simulations as well as preparing the figures for the publications.
Contact
You are welcome to reach us at the provided email address(es) to discuss science.
We are also available at our office for in person meeting at previously agreed times.
Dr. Libál András
Group Leader, Associate Professor
Faculty of Mathematics and Computer Science
Department of the Hungarian Line
of Mathematics and Computer Science
Babes-Bolyai University
Mathematica Building 210
Babes-Bolyai University
Faculty of Mathematics and Computer Science
Ploiesti Street No. 23-25,
RO-400157 Cluj-Napoca, Romania