Important: since it is quite technical, some text is mainly
copy-pasted from the
thesis (see
References). For more compact information you can look at the
Neural Computation article.
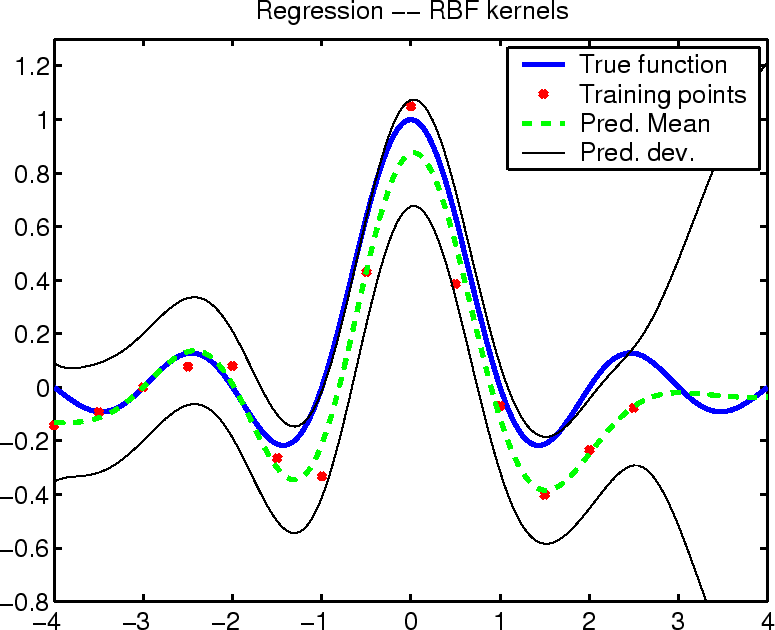
Regression with additive Gaussian noise
A trivial example of the above procedure is regression with
additive Gaussian noise assumption. The image below shows the
resulting mean of the posterior process together with the true function
and the predicted variance around the mean.
Let us assume that the additive Gaussian noise has variance

.
At
time
t + 1 we need the marginal of GP
(
 t
t,
Ct)
taken at the new data point
xt + 1. This marginal is a normal distribution with
mean
mt + 1 =
kt + 1Tt and covariance

=
k* +
kt +
1TCtkt + 1.
The coefficients
q(t + 1) and
r(t +
1) are :
Exact computation, as it has been mentioned is only possible for
the case above. The online approximation is be employed for non-standard
regression where the noise is additive but the noise distribution is
non-Gaussian.
For this exact case of regression with Gaussian noise one can show
that the iterative online update is actually the iterative matrix
inversion formula
(presented in detail in Appendix
C of the
thesis).
Questions, comments, suggestions: contact Lehel
Csató.