Background: consider a system consisting of n functionally identical process computers, each having a complete set of sensors. Each computer evaluates the readings from the sensors and decides what to do to controll the process. If they command the same action to tha actuators, the action is performed; otherwise, the action is based on the command from the majority of the process computers and an alarm is raised. To do this, however, all the computers must have all the input data from the sensors and must agree on the content of that data. This leads to the following consensus problem.
We assume we have n processes, and each one has an input value xi. Those values should be the same but, occasionally, they can differ. All processes must agree on a value to be used as input for further processing. If all inputs are equal, the agreed value must be equal to this input; if the inputs are not all equal, the agreed value can be the input of any process, but it must be the same for all processes.
The requirements are:
Like the consensus, but the processes are supposed to find a vector containing the inputs of all processes. The requirements are:
A source process (the general) must send a message to other processes (its lieutenants). However, the source process may be faulty; even in that case, all the (correct) recipients must agree on the transmitted message. Essentially, this is the interactive consensus problem, but we need only the component corresponding to one process (the source).
The problem is unsolvable, even if there is at most one process that can fail and the only failure is crash-failure.
Intuitively, the problem is that we cannot distinguish between a failed process and a slow process. However, the formal proof relies on assuming the existence of a solution, examining the decision tree and finding a contradiction.
The solution for interactive agreement is the following:
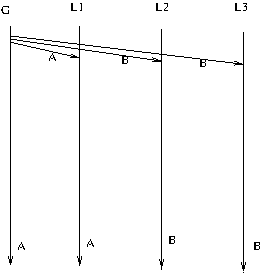
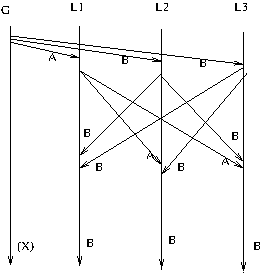
For at most one failed process, we need n≥4. In the first round, each process sends its input to everybody else. In the second round, each process sends everybody else the values received in the first round. In the third round, each process p computes, for each other process q, the corresponding value in the output vector as follows: it looks at the reported values for q's input (the one received directly in round 1, and the two reported by the others in round 2). If at least 2 of them are equal, that value is set in the output vector; otherwise, a default (null) value is set.
The algorithm generalizes to any number n of processes, as long as the number t of faulty processes is strictly less than one third (3t < n). This limit is proven necessary.
Two processes must reach an agreement (like in the consensus problem). The two processes are supposed correct, but the communication may lose messages. However, it is supposed that the communication does not become permanently faulty. This means that, at any point, if one process sends enough messages, one of them will be delivered (however, the source cannot know how many messages to send).
It is proven that no solution exists. The idea is to suppose that a protocol exists, to remove all unnecessary messages, and then to notice that for the last message, while it is necessary for the receiver in order to decide, the sender cannot know if it was delivered or not.
Radu-Lucian LUPŞA